Assignment:
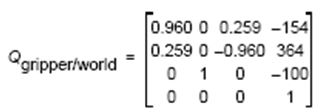
The serial manipulator shown in figure is set in a configuration such that the pose of the effector with respect to a world reference frame, Rworld, is defined by the composed homogeneous transformation matrix, Qgripper/world, that follows (defined with respect to evolving reference frames):
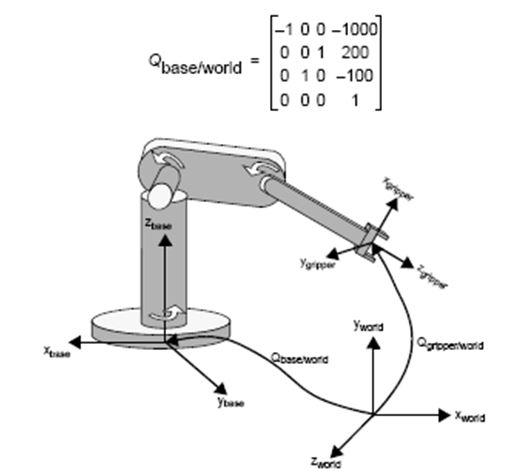
On the other hand, the pose of the robot base with respect to the world reference frame, Rworld, is defined by the composed homogeneous transformation matrix, Qbase/world, that follows (defined with respect to evolving reference frames):
Moreover, the Denavit-Hartenberg parameters of the manipulator in this configuration are defined as follows:
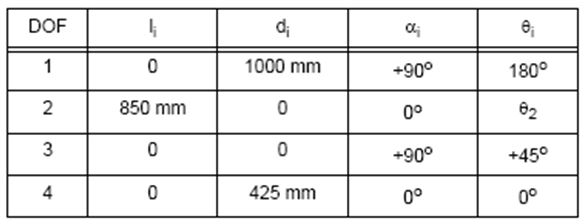
Determine the rotation angle of the second degree of freedom, theta2, that must be used to bring the effector to the specified configuration.