Assignment:
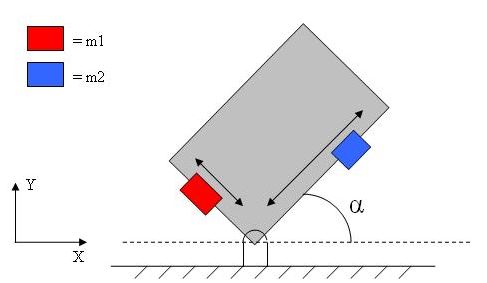
Could someone help me to derive the equations of motions for the system. Basically it's a 2-dimensional "box" which should be stabilized on its rotating(pin) joint by adjusting counterweights m1 and m2 with linear motors. Counterweights m1 and m2 can move of speed v1 and v2 respectively. We can assume the box and the linear motors themselves doesn't weight anything here. Angle alfa can have values from 0 to 90 degrees.