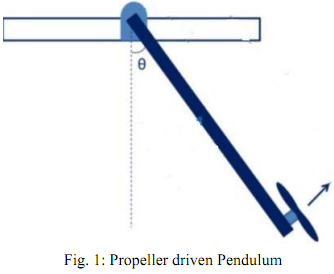
It is required to balance the propeller driven pendulum shown in Fig. 1 at a desired angle "Θ". The length of the pendulum from the pivot point to free end of pendulum is ‘L' and the mass of the pendulum is ‘m'.
Methodology: The objective will be achieved through five major tasks
1. Derive the equation of motion for the system to obtain the mathematical model.
2. Experimentally obtain the parameters of transfer function of the pendulum system.
3. Perform stability analysis of the system using:
a. Routh's stability criteria
b. Draw the Root locus of the system and find the critical gain Kcr.
c. Bode Plots
4. Use the system model to design a controller in MATLAB to meet the following performance criteria:
a. Steady state error less than 10%
b. Settling time less than 2 seconds
c. Overshoot less than 5%
5. Implement the designed controller in the lab and test its performance.